无刷电机在多功能厨师机的优化分析
1、厨师机产品基本概况
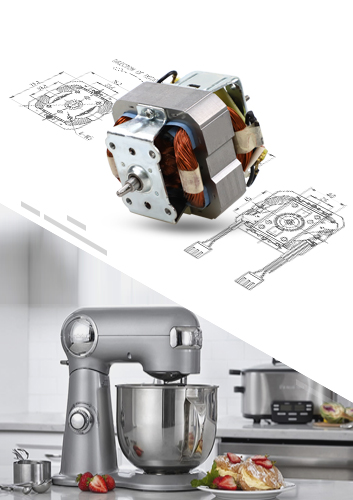
厨师机又称智能炒菜机,可以完成炒菜机、炖锅、电饭煲、蒸锅等综合烹饪,豆浆机、酸奶机、原汁机等专项烹饪,绞肉机、打蛋机等食材处理功能,因此烹饪机具有"世界美食自动烹饪专家"的美称,比较符合现代人对生活品质提高的需求。
电机作为烹饪机的动力机构,主要用来带动刮刀或者搅拌器用来搅拌或者切碎食物,市面上的产品大部分采用直驱方式驱动。在揉面等工况下电机转速较低但是需求转矩很大,否则电机会堵转;在打汁等工况下电机需要转速很高,防止食物颗粒度不够。目前市面上的烹饪机一般采用开关磁阻电机。开关磁阻电机是一种新型调速电机,优点是起动转矩大和调速范围宽。在低速时控制器输出较少的电流,电机得到较大的起动转矩,启动转矩达到额定转矩的150%时,启动电流仅为额定电流的20%;在高速时电机可以达到很宽的调速范围。但是开关磁阻电机的缺点也比较明显,开关磁阻电动机转子上产生的转矩是由脉冲转矩叠加而成,因此转矩脉动与噪声震动大。
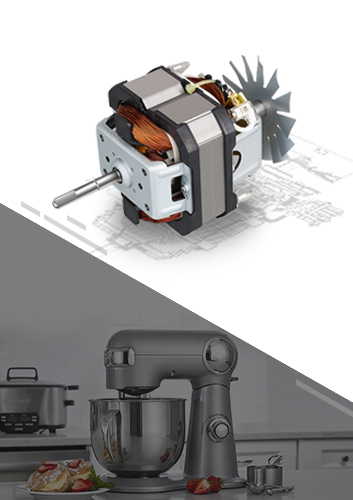
无刷电机(BLDC)是在有刷直流电动机的基础上发展来的,克服了有刷直流电机的先天性缺陷,以电子换向器取代了机械换向器,由于转子采用永磁体,功率密度高,相同功率电机体积更小,低速下额定电流可以输出额定转矩。无刷电机(BLDC)按照驱动波形可以分为方波驱动和正弦波驱动,其中正弦波驱动可以改善电机运行效果,使输出力矩均匀噪音降低,因此无刷电机(BLDC)采样正弦波驱动时可以解决开关磁阻驱动的噪音问题,而对于无刷电机(BLDC)在低速时的输出转矩能力和高速调速需要进行分析优化。
2、市场需求和痛点
烹饪机对电机的需求和痛点概况为下面三点,
低速大扭矩需求,电机转矩需要低速揉面在3N左右,考虑切硬的食物转矩需求可能到5N。
宽调速范围需求,烹饪机需要完成多种专项烹饪要求,因此需要电机在宽的调速范围内工作,转速要求在50转到10000转。
家用产品需要解决产品的噪音问题。
3、解决方案的优化分析
3.1原始解决方案分析
为了解决电机的静音问题,烹饪机的产品解决方案采用无刷电机正弦波驱动解决电机噪音问题,下面分析初版电机解决方案的转矩是否符合要求,电机线电阻R=1欧,d轴电感Ld=0.0017H,q轴电感Lq=0.0027H,电机反电势Ke=13.9V/krpm。
电机的转矩常数:Kt=0.0165×Ke=0.229N.m/A
在id=0的控制器控制模式下,输出转矩:T=Kt×I=0.23×I
因此输出转矩T=3N时对应的输出相电流有效值=13A,如果考虑最大输出转矩5N时对应的输出相电流有效值=21.7A,实际电机测试持续电流在相电流有效值在10A时电机会发热严重烧毁电机,因此样机的转矩常数偏小需要优化。
3.2转矩常数优化
在id=0的控制方式下,转矩常数定义为转矩和电流的比值,因此在低速下要达到产品需求的大转矩要求电机必须设计更大的转矩常数,这样达到相同转矩输出的电流更小。验证转矩常数优化的效果,把样机的定子绕组匝数由30匝提升为100匝,此时优化后的电机的参数如下:
电机线电阻R= 6.8欧,d轴电感Ld=0.0147H,q轴电感Lq=0.0247H,电机反电势Ke=38.6V/krpm。
电机的转矩常数:Kt=0.0165×Ke=0.63N.m/A
在id=0的控制器控制模式下,输出转矩:T=Kt×I=0.63×I
实际测试时控制器输出电流的有效值在5A左右输出转矩在3N左右符合,转矩常数是否合适需要综合考虑实际烹饪机对电机的最大持续转矩需求的电流小于电机实际的额定电流,防止持续输出功率导致电机发热严重烧毁电机。
3.3电机转速对转矩系数的限制
转矩系数增加对于相同转矩来说,输出电流会更小,那么是否可以把转矩系数任意增强解决电机的转矩输出问题呢,答案是不可以。
因为由于Kt=0.0165×Ke,转矩系数的增加会导致反电势系数的增加,反电势系数的增加直接导致电机的最高转速会下降,电机控制器在SVPWM调制下的最大输出电压
其中Udc为控制器母线电压=310V,一般取0.95,经过计算Umax=170V。
在控制算法不进行特殊处理的情况下,原始样机的Ke=13.9 V/krpm,样机的最高理论转速=Umax/Ke=12230转。经过增加匝数后的样机Ke=38.6 V/krpm,增加匝数的样机的最高理论转速=Umax/Ke=4404转。
经过计算分析,增加转矩常数可以解决电机在低速时的转矩出力问题,但是转矩常数的增加会导致电机不进行特殊算法处理的最高转速下降,比如当增加电机的匝数后电机的最高理论转速降为4400转左右,因此需要使用弱磁算法扩展电机的调速范围。
弱磁控制是目前PMSM的一个研究热点,电动机减弱磁场就可以实现高速运行(转矩也随之减小),以便扩展最高转速。对于PMSM由于转子是永磁体,不能简单通过控制励磁电流实现弱磁控制,可以在抵消永磁体磁通的方向上施加一个励磁性质的电流,实现弱磁控制,电机在弱磁时也不能无限的扩展弱磁调速范围,具体的弱磁极限需要考虑到电机的具体参数,具体的弱磁分析在以后再讨论,一般取弱磁范围在3倍弱磁内即可,在满足转矩要求的情况下弱磁范围尽可能的减小,当增加电机的匝数后电机的转速从4400转弱磁到产品需求的10000转时大概有2.3倍的弱磁。
3.4电感参数优化
3.4.1 MTPA算法介绍
通过上面分析,转矩常数不能无限增大,转矩常数增大会导致电机转速的下降,对弱磁扩速的范围要求增大,因此应该适当增加转矩常数,在转矩常数合适的情况下,电机可以通过MTPA算法增加电机的转矩输出能力。
验证转矩常数优化时电机d轴电感Ld=0.0147H,q轴电感Lq=0.0247H,此时可以看到电机存在凸极效应,针对凸极电机控制算法可以采用MTPA(最大转矩电流比控制)算法降低电机的电流大小。
电机的转矩公式:

传统的矢量控制包括Id=0控制和最大转矩电流比控制,由于表贴式PMSM的dq轴电感基本相同,所以在转矩表达式中不包含磁阻转矩,而对于内置式PMSM而言,其dq轴电感不等,在转矩表达式中就会出现一部分磁阻转矩,所以通过一定的控制方式可以利用该磁阻转矩使得在输出同等转矩时的定子电流达到最小,进而减小损耗,提高电机的效率,所以重点是要讨论使用何种控制方法实现同样的转矩而电流达到最小。
电流的限制条件:

为了找到极值关系,利用数学中的拉格朗日定理,引入辅助函数:

接着开始拉格朗日求极值的过程:

最终可以求的id和iq分别为:


3.4.2 电感参数优化方向
MATLAB是一种用于算法开发、数据可视化、数据分析以及数值计算的科学计算语言和编程环境,使用Matlab工具可以仿真电机控制算法。以修改匝数的永磁电机参数进行仿真计算,需要注意磁链参数:Phyf=2/3×Pn×Kt=0.108Wb
下图仿真结果可以看出,输入电流有效值7A,经过MTPA算法计算得到最大的输出转矩Te=5.2Nm。
如果采用Id=0的控制策略,那么相同的转矩Te=5.2N需要的输入电流有效值=Te/Kt=8.2A。即相同的转矩采用MTPA算法和采用Id=0控制算法,电流相差有1.2A。

结论:MTPA算法可以利用部分磁阻转矩,因此无刷电机可以利用该算法减小相同转矩的输出电流,根据转矩的公式可以看出,磁阻转矩的大小与(Ld-Lq)的差值大小有关,因此为了更好的发挥出无刷电机的磁阻转矩,(Ld-Lq)的差值需要比较大。
4、结论
4.1通过上面的分析可以得到电机的优化点大概有:
试制样机的转矩系数比较小,要达到低速下的转矩需求需要增加电机的转矩系数。
样机的转矩系数不能无限增加,需要考虑到电机的弱磁能力,电机的弱磁扩速需要在3倍以内,在满足转矩输出能力的情况下尽可能小。
在转矩系数不能无限增加的情况下,可以调整电机的Ld和Lq电感值,使电机的凸极性增加方便进行MTPA算法,这样电机可以利用部分磁阻转矩提高电机的转矩输出能力。
4.2从电机控制器的控制算法上看优化的方向有:
低速进行MTPA算法发挥电机的最大转矩。
在达到电机的理论最高转速后需要进行弱磁算法扩展电机的调速范围。
 分享
分享